 (2).png)
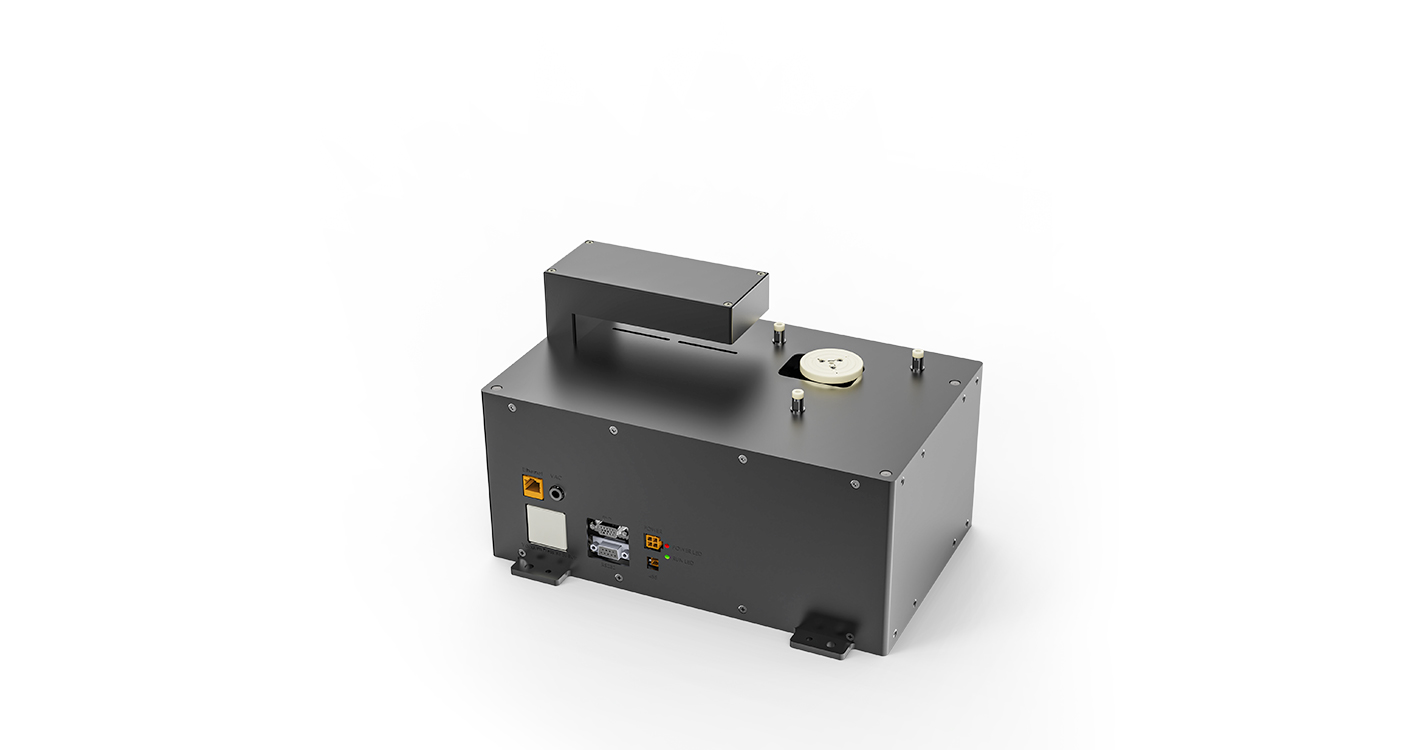
· ROBOT DODY/ARM轴采用伺服闭环控制方式
· ROBOT FLIP EEF轴采用步进闭环控制方式
· 可以在选配中选择拟似水平多关节动作对应平行配置的设备布局
· 可搬运重量:手臂第三关节中心处3Kg以下
· 采用双臂结构,可缩短晶圆交换时间
· 可搭配不同类型的FORK,满足多样的使用工况
· 可根据设备布局采用底部固定或顶部法兰固定
· 晶圆固定方式:真空吸附式、接触式伯努利型
· RS232/EtherNet,直接与上位机连接与通讯

| 搬运物 | 3寸/4寸/6寸/12寸晶圆 | ||
| 可动范围(旋转中心至第三关节中心处) | 手臂 | Theta 旋转 | 升降 |
|
300/400/500m |
340° |
240/300/400/500 | |
| 搬送速度(平均速度) | 2000mm/s |
340°/S |
500mm/s |
| 手臂类型 | 双臂 | ||
| 搬运高度 | 700--1020mm(底座固定面到手指上的晶圆安装面的高度) | ||
| 重复精度 | 士0.1mm以内 | ||
| 通讯协议 | HEX/ASCII | ||
| 通讯方式 | EtherNet/RS232 | ||
| 洁净度 | 最高 ISO Class1 | ||
| 厂务 | 电源:220V,10A,真空:-70~-90Kpa,正压:0.1~0.5Mp | ||
声明:本网站所展示产品外观、参数、性能描述、对比数据等均来自大族富创得内部实验室自有产品的检测和实验,仅供参考,以实物及实际参数为准,不做为法律依据。
021-34786180
sales@fortrend.com
上海市闵行区万芳路555号1号楼102、202室

.jpg)

二工位产品中心白底图1420x750.jpg)


二工位产品中心白底图1420x750.jpg)




.jpg)




2.jpg)




.jpg)
.jpg)
.jpg)
.jpg)
 (2).jpg)
 (1).jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)




